Autofahren ist, objektiv gesehen, eine recht simple Angelegenheit. Ein Kraftfahrzeug wird genutzt, um Personen und sonstige Güter von einem Ort an einen anderen zu befördern.
In unserer subjektiven Erfahrung ist Autofahren aber viel, viel mehr. Im Auto erleben wir ein einzigartiges Gefühl von Freiheit, denn wir können losfahren, wohin wir möchten und wann es uns passt. Das Auto ist ein kleines Refugium im Alltag, nicht richtig privat, aber auch nicht öffentlich; ein halb-privater Puffer, der uns ein bisschen Distanz zu der Welt ausserhalb des Autos verschafft. Das Auto wärmt uns, wenn es draussen kalt ist; das Auto hält uns trocken, wenn es draussen stürmt. Dabei ist das Auto zwangsläufig immer ein Ort des Ego: Ich sitze am Steuer, ich lenke diese mächtige Maschine, ich bahne mir meinen Weg. Dieser Egozentrismus mag uns ein wohliges Gefühl verleihen, aber er führt tendenziell auch dazu, dass wir eine verzerrte Wahrnehmung der Dinge haben. Zum Beispiel: Wir alle meinen, deutlich besser Auto zu fahren als andere anderen Autofahrerinnen und Autofahrer1 2 3 4 5. Oder ein verwandtes Beispiel: Subjektiv neigen wir dazu, die Folgen von Alkohol und anderen Drogen auf unsere Fahrtüchtigkeit zu unterschätzen6 7 8 9.
Autofahren ist also ein zutiefst emotionales und entsprechend oft irrationales Erlebnis. Zwischen Autofahren als subjektivem Erlebnis und Autofahren als objektivem Sachverhalt herrscht darum eine Diskrepanz rund um Fragen von Risikoeinschätzung. Diese Diskrepanz zwischen objektiven Risiken und subjektiver Risikowahrnehmung betrifft auch eine aktuelle Entwicklung zum Thema Autofahren: Selbstfahrende Autos.

Der Prototyp eines selbstfahrenden Autos von Google (Quelle).
Autos, die selber ohne menschliches Zutun fahren, waren lange Zeit Science Fiction, aber mittlerweile handelt es sich um Science ohne Fiction. Prototypen selbstfahrender Autos werden seit Jahren getestet, und es ist nur eine Frage der Zeit, bis die ersten solcher Autos serienreif werden. Intuitiv kommen beim Gedanken an fahrerlose Autos grosse Bedenken auf: Selbstfahrende Autos können doch nicht sicher sein, ist doch eines der Grundkonzepte des Autofahrens, dass das Gefährt immer aktiv bedient werden muss.
Die Unfallursache Nr. 1 – der Mensch
Die Anzahl der Menschenleben, die infolge von Unfällen im Strassenverkehr zu beklagen sind, gehen in westlichen Staaten seit Jahrzehnten mehr oder weniger kontinuierlich zurück10:
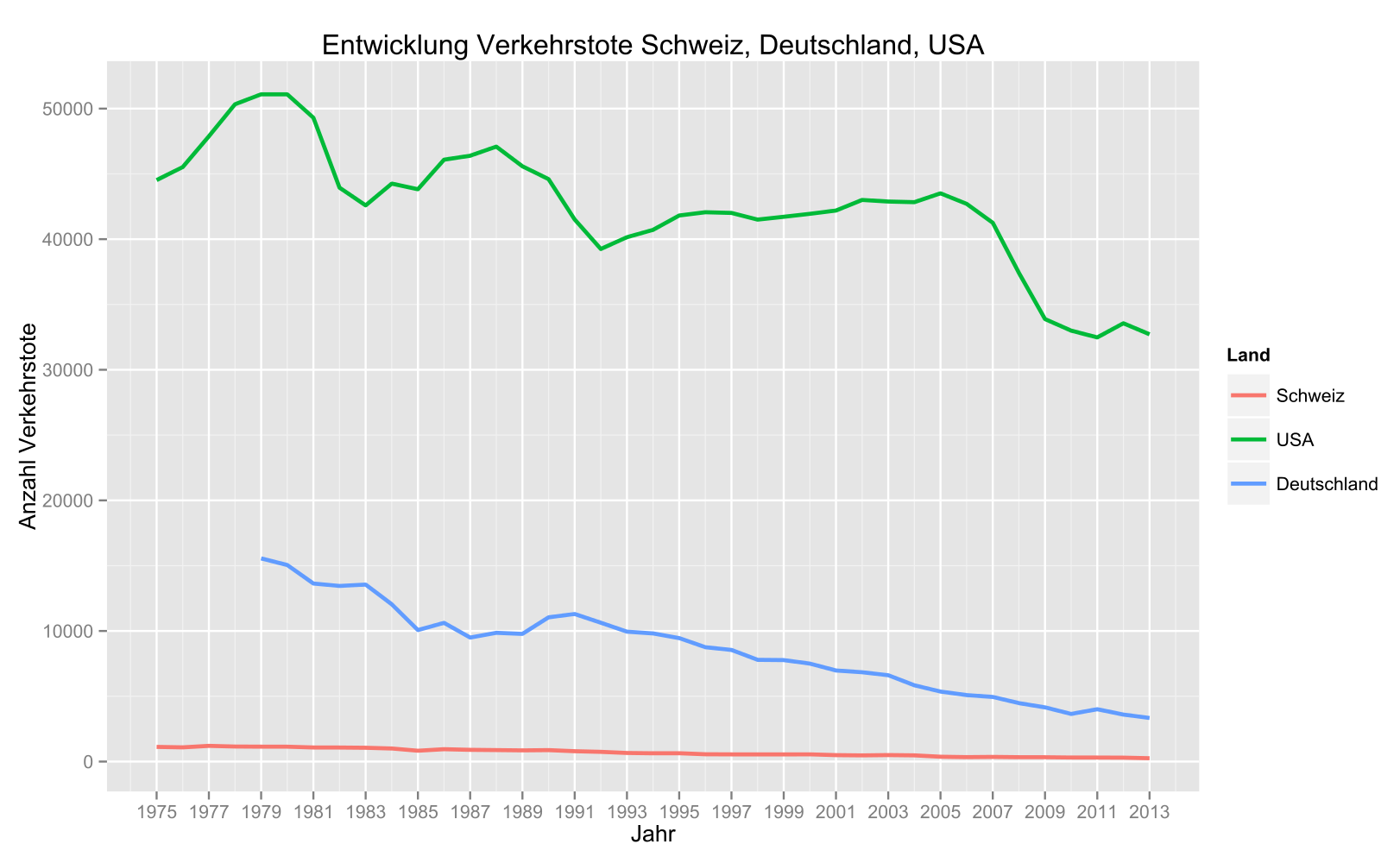
Der Trend in den USA scheint auf den ersten Blick weniger klar als in der Schweiz oder in Deutschland, aber die Entwicklung geht auch für die USA deutlich hin zu weniger Verkehrstoten, wenn die relative Anzahl Unfälle im Verhältnis zu der Bevölkerungsgrösse anstatt die absolute Anzahl betrachtet wird11.
Strassen werden tendenziell sicherer, und das ist erfreulich. Für die Zunahme von Verkehrssicherheit gibt es einerseits exogene Gründe, also Faktoren, welche zur Erhöhung der Verkehrssicherheit beitragen und nicht menschliches Verhalten betreffen. Exogene Faktoren sind beispielsweise modernere Technologie in Autos12 13 oder moderne, evidenzbasierte Standards im Strassenbau14 15 16 17 18.
Viel wichtiger als exogene faktoren sind aber endogene Faktoren, also Faktoren, die mit dem Verhalten und Handeln von Menschen zu tun haben. Das hat einen einfachen Grund: Die Mehrheit der Unfälle im Strassenverkehr ist Folge menschlichen Versagens. Die Hauptprobleme lassen sich an einer Hand abzählen: Zu schnelles Fahren; Ablenkung während des Fahrens; Übermüdung; Fahren unter Alkoholeinfluss19 20 21 22 23 24 25.
Die Mehrheit der Unfälle im Strassenverkehr ist Folge menschlichen Versagens.
Diese Haupt-Risikofaktoren für Unsicherheit im Strassenverkehr sind allesamt Risikofaktoren, welche mit autonomen Autos, prinzipiell, behoben werden. Ein wesentliches Beispiel ist zu schnelles Fahren. Die generell im Westen beobachtbare Abnahme der Verkehrstoten in den letzten Jahrzehnten ist vor allem eine Abnahme der getöteten Fussgänger26. Ein wichtiger Grund, warum Fussgänger aber nach wie vor von Autos getötet werden, ist überhöhte Geschwindigkeit. Die Wahrscheinlichkeit, von einem Auto getötet zu werden, hängt nämlich direkt davon ab, wie schnell ein Auto fährt27 28. Das bedeutet beispielsweise, dass die Wahrscheinlichkeit, bei einer Kollision mit 50 km/h zu sterben, deutlich geringer ist, als die Wahrscheinlichkeit, bei einer Kollision mit 60 km/h zu sterben. Diese an sich banale Erkenntnis ist einer der Gründe, warum die so verhassten «Radarfallen» in Tat und Wahrheit Unfälle reduzieren und Leben retten29 30 – wir mögen uns ob des «Bussenterrors» der «Radarfallen» nerven, aber es handelt sich dabei um eine wirksame Massnahme zur Erhöhung der Verkehrssicherheit. Wenn also die Erhöhung der Verkehrssicherheit das Ziel ist, und wir wissen, dass Menschen generell dazu neigen, zu schnell zu fahren, ist es irrational, a priori gegen eine neue Technologie zu sein, welche das Problem der überhöhten Geschwindigkeit potenziell noch effektiver angeht als bestehende Massnahmen.
Hier offenbart sich der irrationale Kern der Diskrepanz zwischen unserem subjektiven Unbehagen gegenüber selbstfahrenden Autos und der evidenzbasierten Realität:
- Subjektiv haben wir Angst, dass selbstfahrende Autos im Strassenverkehr gefährlich sind.
- Objektiv geht die grösste Gefahr im Strassenverkehr von uns Menschen aus, denn der Grossteil aller Verkehrsunfälle ist die Folge menschlichen Versagens.
Die subjektive, emotionale Frage bei selbstfahrenden Autos ist: Sind sie sicher? Diese Frage ist wichtig, aber die angebrachtere generelle, da übergeordnete Frage ist: Wie können wir die Sicherheit im Strassenverkehr erhöhen?
Eine Antwort auf diese Frage: Gegeben des Wissens, dass Unsicherheit im Strassenverkehr direkt und fast gänzlich die Folge menschlichen Handelns ist, können wir Sicherheit im Strassenverkehr dadurch erhöhen, dass menschliches Handeln im Strassenverkehr reduziert wird. Beispielsweise durch autonome Autos.
Gegeben des Wissens, dass Unsicherheit im Strassenverkehr direkt und fast gänzlich die Folge menschlichen Handelns ist, können wir Sicherheit im Strassenverkehr dadurch erhöhen, dass menschliches Handeln im Strassenverkehr reduziert wird.Wenn wir dieses Wissen ob der empirischen Realität der Wahrscheinlichkeit von Unfällen und der dahinterliegenden Kausalitäten aufgrund subjektiver Bedenken ignorieren, begehen wir einen groben «Base Rate»-Denkfehler31.
Selbstfahrende Autos: Eine Weiterentwicklung, keine Neuerfindung
Die Diskrepanz zwischen subjektiver und objektiver Risikoeinschätzung selbstfahrender Autos hat, nebst der generellen Problematik des subjektiven Denkens, einen weiteren emotionalen Grund: Das Erlebnis des Autofahrens ist ein bedeutendes Erlebnis der Potenz und der Kompetenz – ich sitze am Lenkrad, ich bediene die Pedale, ich steuere mein Gefährt. Ein autonomes, selbstfahrendes Auto widerspricht diesem selbstverständlichen Ross-und-Reiter-Zustand – das Auto steuert sich selber, ich verkomme zum passiven Zuschauer. Selbstfahrende Autos wecken die Angst vor Kontrollverlust.
Selbstfahrende Autos wecken die Angst vor Kontrollverlust.
Diese Angst vor Kontrollverlust als Grund für unser Unbehagen gegenüber selbstfahrenden Autos ist in zweifacher Hinsicht problematisch.
- Erstens, weil, wie oben argumentiert, die grösste Gefahr im Strassenverkehr wir selber sind und selbstfahrende Autos den Risikofaktor Mensch reduzieren könnten.
- Zweitens, weil selbstfahrende Autos als eine komplett und kategorisch neue Erfindung angesehen werden, obschon es sich dabei eher um eine Weiterentwicklung im Rahmen eines bestehenden Sicherheitsparadigmas handelt.
Der zweite Punkt mag irritieren: Selbstfahrende Autos sollen nicht etwas komplett Neues sein? In der Tat ist die Technologie der selbstfahrenden Autos eine neue Entwicklung, aber diese neue Entwicklung bedeutet nicht, dass die gegenwärtige Autotechnologie das genaue Gegenteil ist, eine komplette Kontrolle durch den Menschen. Fahrzeugautonomie als entweder komplett vorhanden (selbstfahrende Autos) oder komplett abwesend (von Menschen kontrollierte Autos) zu verstehen, ist eine falsche Dichotomie. Seit Jahrzehnten entwickelt sich Autotechnologie nämlich schrittweise und erfolgreich in Richtung mehr Autonomie für das Fahrzeug und weniger direkte Kontrolle durch den Menschen.
Zwei der vielleicht bekanntesten Beispiele:
- Seit ca. den 1970-er Jahren sind Autos mit Antiblockier-Systemen (ABS) auf dem Markt. ABS verhindert, dass bei abruptem Bremsen die Räder blockieren, indem der Bremsdruck elektronisch geregelt wird. ABS kann zu weniger Unfällen führen32 33, vor allem bei Motorrädern34 35. Der Effekt bei Autos ist nicht immer ausgeprägt, weil Autofahrerinnen und Autofahrer nicht wissen, was ABS ist und, was ABS in Risikosituationen bedeutet36.
- In den 1990er Jahren wurde die Technologie «Electronic Stability Control» (ESC) eingeführt. Mittels ESC werden einzelne Räder eines Autos elektronisch abgebremst, um ein Schleudern des Autos zu vermeiden. ESC funktioniert komplett autonom, ohne Bremsaktivität der Fahrerin oder des Fahrers. ESC trägt deutlich zur Verkehrssicherheit bei37 38 39 40 41 42.
Die Entwicklung solcher Fahrassistenz-Technologien geht beständig weiter. So sind bereits unterschiedliche Werkzeuge im Einsatz bzw. werden erforscht, um Fehlverhalten durch Unaufmerksamkeit oder Müdigkeit zu kompensieren43 44 45 46. Die Entwicklung weitgehend autonomer, selbstfahrender Autos ist darum nur ein weiterer Schritt in einem langanhaltenden Trend – autonome Autos stellen kein prinzipiell neues Paradigma dar.
Autonome Autos stellen kein prinzipiell neues Paradigma dar.
Der zu wenig differenzierte Diskurs in den Massenmedien
Kritisch über Autos mit und ohne Menschen am Steuer nachzudenken, fällt uns also schwer. Wenn wir dies doch tun, wird klar, dass die Evidenz rund um Verkehrssicherheit im Grunde dafür spricht, das Spektrum der Handlungskompetenz von Menschen hinter dem Lenkrad weiter zu verringern. Ebenso wird klar, dass selbstfahrende Autos als Umsetzung dieser Schlussfolgerung keine revolutionäre Idee sind, sondern sich in die bestehende Entwicklung der Autotechnologie der letzten Jahrzehnte einreihen.
Eine solche kritische Einschätzung selbstfahrender Autos fällt uns, emotionalerweise, schwer. Wenig hilfreich ist dabei, dass der massenmediale Diskurs rund um selbstfahrende Autos das unpassende Bild eines revolutionären Paradigmenwechsels zeichnet und dadurch diesem emotionalen Unbehagen vorschub leistet. Auch an und für sich gut recherchierte und vertiefende Artikel perpetuieren einige Missverständnisse und Fehleinschätzungen rund um selbstfahrende Autos. Ein gutes Beispiel dafür ist ein Bericht, der am 12. Mai 2015 bei SRF anlässlich einer Probefahrt eines selbstfahrenden Autos des Telekomunternehmens Swisscom erschien47. In diesem Bericht werden einige Aspekte selbstfahrender Autos als Probleme dargestellt, welche bei genauerer Betrachtung keine wirklichen Probleme darstellen: Die Frage einiger juristischer Zuständigkeiten und die Frage einiger ethischer Überlegungen.
Aus juristischer Sicht seien selbstfahrende Autos ein Problem, so der SRF-Artikel, weil gemäss dem UN-Abkommen über Strassenverkehr von 196848 Autolenker jederzeit die volle Kontrolle über ihr Auto haben müssen und darum die Hände immer am Lenkrad haben müssen. Abgesehen davon, dass im Abkommen nicht explizit erwähnt wird, dass die Hände zu jeder Zeit am Lenkrad sein müssen, ist eine solche juristische Auffassung nicht kompatibel mit der Realität – bereits jetzt sind diverse Fahrhilfen im Einsatz, welche die Kontrolle über das Fahrzeug teilweise bis ganz (etwa bei Einparkhilfen) übernehmen.
Darüber hinaus sei juristisch gesehen, so der SRF-Artikel, die Schuldfrage ungeklärt: Wer ist schuld, wenn ein Unfall passiert? Auf den ersten Blick ist das ein gewichtiges Problem, aber bei genauerer Überlegung manifestiert sich überhaupt kein grundsätzlich neues Problem. Bereits heute sind in jeden Autounfall unterschiedliche potenzielle Parteien involviert: Die Person, die das Auto zum Unfallzeitpunkt gelenkt hat; der Hersteller des Autos (für Unfälle infolge von Herstellungsdefekten haften die Hersteller); die Autogarage (falls bei einer Wartungsarbeit geschlampt wurde), usf. Das ergibt bisweilen komplexe Konstellationen, und diese komplexen Konstellationen werden so evidenzbasiert wie möglich analysiert. Es ist ein Fehlschluss, davon auszugehen, dass der Umstand, dass wir heute noch keine praxistaugliche gesetzliche Regelung haben, automatisch bedeutet, dass es prinzipiell keine praxistaugliche gesetzliche Regelung geben kann.
Die zweite Herausforderung, so der SRF-Artikel, sei ethischer Natur. Es ist nämlich gut denkbar, dass in gewissen Gefahrensituationen ein Unfall nicht mehr vermeidbar ist, und in diesen Gefahrensituationen bestimmt das selbstfahrende Auto den Ausgang des Unfalls mit. Als Menschen hinter dem Lenkrad würden wir tendenziell einfach reichlich irrational reagieren, aber ein selbstfahrendes Auto würde aufgrund bestimmter Vorgaben eine kalkulierte Entscheidung treffen. Genau wie die Schuldfrage ist dieser Aspekt auf den ersten Blick heikel, erweist sich bei genauerer Überlegung aber als Problem, das keines ist. Denn das, was ein Problem sein soll, ist rationalerweise nämlich die Lösung des Problems: Selbstfahrende Autos operieren nach der Maxime, dass der Schaden minimal gehalten werden soll. Das ist nicht nur nicht ein Problem, sondern ein gewichtiges Argument zugunsten selbstfahrender Autos. In hektischen Stresssituationen, die zu Unfällen führen, reagieren wir Menschen irrational, und genau diese irrationale Komponente als Risikofaktor liesse sich durch selbstfahrende Autos eliminieren. Um nur ein plakatives Beispiel zu nennen: Anders als wir Menschen wird ein selbstfahrendes Auto vermutlich nicht das Gaspedal mit dem Bremspedal verwechseln49 50, wenn es hektisch wird.
Fazit
Es mag etwas eigenartig anmuten, sich in relativ grossem Umfang dem Thema der selbstfahrenden Autos zu widmen, denn bis sich tatsächlich die Frage stellt, ob wir im regulären Strassenverkehr selbstfahrende Autos zulassen wollen, dürften noch einige Jahre oder Jahrzehnte vergehen. Dennoch ist die Debatte wichtig, denn sie zeigt auf, was in der öffentlichen Diskussion neuer Technologien schief läuft.
Anstatt die Jetzt-Situation so evidenzbasiert wie möglich abzustecken, um die Chancen und Risiken der neuen Technologie so objektiv wie möglich einschätzen zu können, wird die Jetzt-Situation subjektiv als «Normalzustand» gedeutet, und ein jedes Abweichen von diesem «Normalzustand» wird irrationalerweise als Risiko eingestuft. Selbstfahrende Autos schätzen wir folglich intuitiv als Risiken ein, weil sie von dem gewohnten «Normalzustand», dem Menschen hinter dem Lenkrad, abweichen. Das kritische Hinterfragen dieser Intuition offenbart aber schnell, dass das Abweichen vom «Normalzustand», erstens, wünschenswert ist (der Faktor Mensch ist das grösste Risiko im Strassenverkehr), und, dass das schrittweise Abweichen vom «Normalzustand», zweitens, schon längst im Gang ist.
Quellen und Fussnoten
Autor
- DeJoy, D. M. (1989). The optimism bias and traffic accident risk perception. Accident Analysis & Prevention, 21(4), 333–340. http://doi.org/10.1016/0001-4575(89)90024-9 [↩]
- Delhomme, P. (1991). Comparing one’s driving with others’: Assessment of abilities and frequency of offences. Evidence for a superior conformity of self-bias? Accident Analysis & Prevention, 23(6), 493–508. http://doi.org/10.1016/0001-4575(91)90015-W [↩]
- Horswill, M. S., Waylen, A. E., & Tofield, M. I. (2004). Drivers’ Ratings of Different Components of Their Own Driving Skill: A Greater Illusion of Superiority for Skills That Relate to Accident Involvement. Journal of Applied Social Psychology, 34(1), 177–195. http://doi.org/10.1111/j.1559-1816.2004.tb02543.x [↩]
- McKenna, F. P., Stanier, R. A., & Lewis, C. (1991). Factors underlying illusory self-assessment of driving skill in males and females. Accident Analysis & Prevention, 23(1), 45–52. http://doi.org/10.1016/0001-4575(91)90034-3 [↩]
- Svenson, O. (1981). Are we all less risky and more skillful than our fellow drivers? Acta Psychologica, 47(2), 143–148. http://doi.org/10.1016/0001-6918(81)90005-6 [↩]
- Kelly, E., Darke, S., & Ross, J. (2004). A review of drug use and driving: epidemiology, impairment, risk factors and risk perceptions. Drug and Alcohol Review, 23(3), 319–344. http://doi.org/10.1080/09595230412331289482 [↩]
- Marczinski, C. A., Harrison, E. L. R., & Fillmore, M. T. (2008). Effects of Alcohol on Simulated Driving and Perceived Driving Impairment in Binge Drinkers. Alcoholism: Clinical and Experimental Research, 32(7), 1329–1337. http://doi.org/10.1111/j.1530-0277.2008.00701.x [↩]
- Ronen, A., Chassidim, H. S., Gershon, P., Parmet, Y., Rabinovich, A., Bar-Hamburger, R., … Shinar, D. (2010). The effect of alcohol, THC and their combination on perceived effects, willingness to drive and performance of driving and non-driving tasks. Accident Analysis & Prevention, 42(6), 1855–1865. http://doi.org/10.1016/j.aap.2010.05.006 [↩]
- Van Dyke, N. (2014). Alcohol effects on simulated driving performance and self-perceptions of impairment in DUI offenders. Experimental and Clinical Psychopharmacology, 22(6). http://doi.org/10.1037/a0038126 [↩]
- Datenquellen: Bundesamt für Statistik (http://www.bfs.admin.ch/bfs/portal/de/index/themen/11/06/blank/01/aktuel.html); Statistisches Bundesamt (https://www.destatis.de/DE/Publikationen/Thematisch/TransportVerkehr/Verkehrsunfaelle/VerkehrsunfaelleZeitreihen.html); NHTSA (http://en.wikipedia.org/wiki/List_of_motor_vehicle_deaths_in_U.S._by_year#cite_note-NHTSA11-4) [↩]
- Oster Jr., C. V., & Strong, J. S. (2013). Analyzing road safety in the United States. Research in Transportation Economics, 43(1), 98–111. http://doi.org/10.1016/j.retrec.2012.12.005 [↩]
- Glassbrenner, D. (2012). An Analysis of Recent Improvements to Vehicle Safety. Abgerufen von http://trid.trb.org/view.aspx?id=1147983 [↩]
- National Highway Traffic Safety Administration. (2013). How Vehicle Age and Model Year Relate to Driver Injury Severity in Fatal Crashes. NHTSA. Abgerufen von http://www.trb.org/Main/Blurbs/169502.aspx [↩]
- Dumbaugh, E. (2006). Design of Safe Urban Roadsides: An Empirical Analysis. Transportation Research Record: Journal of the Transportation Research Board, 1961, 74–82. http://doi.org/10.3141/1961-09 [↩]
- Ismail, K., & Sayed, T. (2010). Risk-Based Highway Design. Transportation Research Record: Journal of the Transportation Research Board, 2195, 3–13. http://doi.org/10.3141/2195-01 [↩]
- Karlaftis, M. G., & Golias, I. (2002). Effects of road geometry and traffic volumes on rural roadway accident rates. Accident Analysis & Prevention, 34(3), 357–365. http://doi.org/10.1016/S0001-4575(01)00033-1 [↩]
- Ng, J. C. ., & Sayed, T. (2004). Effect of geometric design consistency on road safety. Canadian Journal of Civil Engineering, 31(2), 218–227. http://doi.org/10.1139/l03-090 [↩]
- Retting, R. A., Ferguson, S. A., & McCartt, A. T. (2003). A Review of Evidence-Based Traffic Engineering Measures Designed to Reduce Pedestrian–Motor Vehicle Crashes. American Journal of Public Health, 93(9), 1456–1463. http://doi.org/10.2105/AJPH.93.9.1456 [↩]
- Bunn, T. L., Slavova, S., Struttmann, T. W., & Browning, S. R. (2005). Sleepiness/fatigue and distraction/inattention as factors for fatal versus nonfatal commercial motor vehicle driver injuries. Accident Analysis & Prevention, 37(5), 862–869. http://doi.org/10.1016/j.aap.2005.04.004 [↩]
- Harbluk, J. L., Noy, Y. I., Trbovich, P. L., & Eizenman, M. (2007). An on-road assessment of cognitive distraction: Impacts on drivers’ visual behavior and braking performance. Accident Analysis & Prevention, 39(2), 372–379. http://doi.org/10.1016/j.aap.2006.08.013 [↩]
- Klauer, S. G., Dingus, T. A., Neale, V. L., Sudweeks, J. D., & Ramsey, D. J. (2006). The Impact of Driver Inattention on Near-Crash/Crash Risk: An Analysis Using the 100-Car Naturalistic Driving Study Data. Abgerufen von http://trid.trb.org/view.aspx?id=786825 [↩]
- Regan, M. A., Hallett, C., & Gordon, C. P. (2011). Driver distraction and driver inattention: Definition, relationship and taxonomy. Accident Analysis & Prevention, 43(5), 1771–1781. http://doi.org/10.1016/j.aap.2011.04.008 [↩]
- Wilson, F. A., & Stimpson, J. P. (2010). Trends in fatalities from distracted driving in the United States, 1999 to 2008. American Journal of Public Health, 100(11), 2213–2219. http://doi.org/10.2105/AJPH.2009.187179 [↩]
- World Health Organization. (2013). WHO global status report on road safety 2013: supporting a decade of action. World Health Organization. Abgerufen von http://www.who.int/violence_injury_prevention/road_safety_status/2013/en/ [↩]
- World Healt Organization. (2004). World report on road traffic injury prevention. World Healt Organization. Abgerufen von http://www.who.int/violence_injury_prevention/publications/road_traffic/world_report/en/ [↩]
- Kopits, E., & Cropper, M. (2008). Why Have Traffic Fatalities Declined in Industrialised Countries? Implications for Pedestrians and Vehicle Occupants. Journal of Transport Economics and Policy (JTEP), 42(1), 129–154. [↩]
- Rosén, E., & Sander, U. (2009). Pedestrian fatality risk as a function of car impact speed. Accident Analysis & Prevention, 41(3), 536–542. http://doi.org/10.1016/j.aap.2009.02.002 [↩]
- Rosén, E., Stigson, H., & Sander, U. (2011). Literature review of pedestrian fatality risk as a function of car impact speed. Accident Analysis & Prevention, 43(1), 25–33. http://doi.org/10.1016/j.aap.2010.04.003 [↩]
- Pilkington, P., & Kinra, S. (2005). Effectiveness of speed cameras in preventing road traffic collisions and related casualties: systematic review. BMJ, 330(7487), 331–334. http://doi.org/10.1136/bmj.38324.646574.AE [↩]
- Wilson, C., Willis, C., Hendrikz, J. K., Le Brocque, R., & Bellamy, N. (1996). Speed cameras for the prevention of road traffic injuries and deaths. In Cochrane Database of Systematic Reviews. John Wiley & Sons, Ltd. Abgerufen von http://onlinelibrary.wiley.com/doi/10.1002/14651858.CD004607.pub4/abstract [↩]
- Bar-Hillel, M. (1980). The base-rate fallacy in probability judgments. Acta Psychologica, 44(3), 211–233. http://doi.org/10.1016/0001-6918(80)90046-3 [↩]
- Burton, D., Delaney, A., Newstead, S., Logan, D., & Fildes, B. (2004). Effectiveness of ABS and vehicle stability control systems. Abgerufen von http://www.monash.edu.au/miri/research/reports/other/racv-abs-braking-system-effectiveness.pdf [↩]
- Farmer, C. M. (2001). New evidence concerning fatal crashes of passenger vehicles before and after adding antilock braking systems. Accident Analysis & Prevention, 33(3), 361–369. [↩]
- Rizzi, M., Strandroth, J., Kullgren, A., Tingvall, C., & Fildes, B. (2015). Effectiveness of motorcycle antilock braking systems (ABS) in reducing crashes, the first cross-national study. Traffic Injury Prevention, 16(2), 177–183. http://doi.org/10.1080/15389588.2014.927575 [↩]
- Teoh, E. R. (2011). Effectiveness of antilock braking systems in reducing motorcycle fatal crash rates. Traffic Injury Prevention, 12(2), 169–173. http://doi.org/10.1080/15389588.2010.541308 [↩]
- Broughton, J., & Baughan, C. (2002). The effectiveness of antilock braking systems in reducing accidents in Great Britain. Accident Analysis & Prevention, 34(3), 347–355. http://doi.org/10.1016/S0001-4575(01)00032-X [↩]
- Erke, A. (2008). Effects of electronic stability control (ESC) on accidents: A review of empirical evidence. Accident Analysis & Prevention, 40(1), 167–173. http://doi.org/10.1016/j.aap.2007.05.002 [↩]
- FARMER, C. M. (2004). Effect of Electronic Stability Control on Automobile Crash Risk. Traffic Injury Prevention, 5(4), 317–325. http://doi.org/10.1080/15389580490896951 [↩]
- Ferguson, S. A. (2007). The Effectiveness of Electronic Stability Control in Reducing Real-World Crashes: A Literature Review. Traffic Injury Prevention, 8(4), 329–338. http://doi.org/10.1080/15389580701588949 [↩]
- Høye, A. (2011). The effects of Electronic Stability Control (ESC) on crashes—An update. Accident Analysis & Prevention, 43(3), 1148–1159. http://doi.org/10.1016/j.aap.2010.12.025 [↩]
- Lie, A., Tingvall, C., Krafft, M., & Kullgren, A. (2006). The Effectiveness of Electronic Stability Control (ESC) in Reducing Real Life Crashes and Injuries. Traffic Injury Prevention, 7(1), 38–43. http://doi.org/10.1080/15389580500346838 [↩]
- Scully, J., & Newstead, S. (2008). Evaluation of electronic stability control effectiveness in Australasia. Accident Analysis & Prevention, 40(6), 2050–2057. http://doi.org/10.1016/j.aap.2008.08.025 [↩]
- Blaschke, C., Breyer, F., Färber, B., Freyer, J., & Limbacher, R. (2009). Driver distraction based lane-keeping assistance. Transportation Research Part F: Traffic Psychology and Behaviour, 12(4), 288–299. http://doi.org/10.1016/j.trf.2009.02.002 [↩]
- Dong, Y., Hu, Z., Uchimura, K., & Murayama, N. (2011). Driver Inattention Monitoring System for Intelligent Vehicles: A Review. IEEE Transactions on Intelligent Transportation Systems, 12(2), 596–614. http://doi.org/10.1109/TITS.2010.2092770 [↩]
- Minoiu Enache, N., Netto, M., Mammar, S., & Lusetti, B. (2009). Driver steering assistance for lane departure avoidance. Control Engineering Practice, 17(6), 642–651. http://doi.org/10.1016/j.conengprac.2008.10.012 [↩]
- Sun, Z., Bebis, G., & Miller, R. (2006). On-road vehicle detection: a review. IEEE Transactions on Pattern Analysis and Machine Intelligence, 28(5), 694–711. http://doi.org/10.1109/TPAMI.2006.104 [↩]
- Selbstfahrende Autos: Welchen Unfall hätten Sie denn gerne? Abgerufen von http://www.srf.ch/wissen/digital/selbstfahrende-autos-welchen-unfall-haetten-sie-denn-gerne [↩]
- United Nations. (1968). Convention on Road Traffic. Abgerufen von http://www.unece.org/fileadmin/DAM/trans/conventn/crt1968e.pdf [↩]
- Freund, B., Colgrove, L. A., Petrakos, D., & McLeod, R. (2008). In my car the brake is on the right: Pedal errors among older drivers. Accident Analysis & Prevention, 40(1), 403–409. http://doi.org/10.1016/j.aap.2007.07.012 [↩]
- Schmidt, R. A., & Young, D. E. (2010). Cars Gone Wild: The Major Contributor to Unintended Acceleration in Automobiles is Pedal Error. Frontiers in Psychology, 1. http://doi.org/10.3389/fpsyg.2010.00209 [↩]
4 Comments on “Die fehlgeleitete Furcht vor fahrerlosen Fahrzeugen”
Sehr guter Artikel, vielen Dank!
Die Frage schlussendlich ist meines Erachtens aber dennoch eine ethische und juristische:
Dass das autonome Fahrzeug in Krisensituationen (z.B. Blitzeis) wesentlich schneller und exakter reagiert als ein Mensch, dürfte wohl Allen klar sein. Aber:
Das Problem mit den Situationen, in denen Unfälle unvermeidbar sind, erachte ich durchaus als etwas komplizierter: Wie soll sich ein Auto „entscheiden“, wenn es entweder ein Kind oder eine Mutter überfahren „muss“? Was passiert, wenn das Auto eine Entscheidung trifft? Wer ist dann schuld an dieser Entscheidung? Der Entwickler, der diesen Algorhytmus aufgrund seiner persönlichen ethischen Einstellung defniert hat? Eine Ethikkommission, die das Verhalten des Autos mitbestimmt hat?
Klar, eine fehlende Antwort auf eine Frage heisst (wie im Artikel erwähnt) natürlich nicht, dass es niemals eine Frage geben wird. Aber wenn wir nicht mehr einfach dem Autofahrer die Schuld geben können, tun sich einige heikle Bereiche auf.
Die Vergleiche mit ABS und ESP erachte ich ebenfalls nicht zielführend:
Wenn ich in einen Unfall verwickelt bin, den ich hätte vermeiden können, mein Bremsweg aber zu lang war, weil mein ABS nicht funktioniert hat (und ich nicht die entsprechend andere Bremstechnik angewandt habe), bin ich trotzdem selbst schuld.
Der Google Car besitzt meines Wissens eine Art „Not-Aus-Taster“, der das Fahrzeug schnellstmöglich zum Stehen bringt. Was passiert, wenn ich diesen nicht gedrückt habe, weil ich aufgrund meiner Erwartungshaltung gedacht habe, das Auto „löst das Problem von sich aus“?
Zusammenfassend: Ich habe keine Angst vor selbstfahrenden Fahrzeugen. Aber ich bin aus vielerlei Gründen ungeheuer kritisch. Denn wir werden damit unser Leben in die Hände der Technik übergeben, obwohl es – anders als bei Eisenbahnen, Flugzeugen, Seilbahnen, usw. – nicht zwingend notwendig ist.
«Das Problem mit den Situationen, in denen Unfälle unvermeidbar sind, erachte ich durchaus als etwas komplizierter: Wie soll sich ein Auto “entscheiden”, wenn es entweder ein Kind oder eine Mutter überfahren “muss”? Was passiert, wenn das Auto eine Entscheidung trifft? Wer ist dann schuld an dieser Entscheidung? Der Entwickler, der diesen Algorhytmus aufgrund seiner persönlichen ethischen Einstellung defniert hat? Eine Ethikkommission, die das Verhalten des Autos mitbestimmt hat?»
In dem konkreten Szenario, wo sich das Auto zwischen Mutter und Kind entscheiden müsste: Meine Vermutung ist, dass sich die Biomechanik eines Kindes von jener einer erwachsenen Person dahingehend unterscheidet, dass das Kind bei gleicher Krafteinwirkung höheren Schaden erleidet. Falls diese Vermutung zutrifft – und das ist letztlich eine Frage der Empirie; sicherlich ist diese Frage klärbar – würde das ganz eindeutig bedeuten, dass das Auto die Mutter überfahren soll.
Ich finde nach wie vor, dass das ein enormer und offensichtlicher Fortschritt gegenüber dem Jetzt-Zustand ist, wo *gar kein* rationales Kalkül stattfindet. Die Regeln, nach denen ein autonomes Auto in solchen Extremsituationen das kleinere Übel zu wählen hätte, werden wir gesamtgesellschaftlich, demokratisch setzen – am Schluss geht es ja um politische Regulierung. Mir scheint aber, dass die Logik der Schadensminimierung recht konsensfähig ist (zumindest hoffe ich das 🙂 ).
Schon heute sind automatische Bremssysteme im Einsatz, die die menschliche Reaktionsfähigkeit übertreffen. Autonome Autos haben das Potenzial, unsere menschliche Fehleranfälligkeit noch weiter zu korrigieren, und also die Wahrscheinlichkeit, dass es überhaupt zu solchen ethisch heiklen Problemsituationen kommt, zu verringern – und wenn es doch zu solchen Situationen kommt, kann das autonome Auto *bessere*, da im Voraus bestimmte Entscheidungen treffen als wir Menschen in der Hitze des Gefechtes. Das scheint mir eine potenzielle Win-Win-Situation.
Wenn wir dereinst autonome Autos auf den Strassen haben, und die Software nachweisbar fehlerbehaftet sein sollte: Es spricht *nichts* dagegen, dass in solchen Situationen die Hersteller in die Pflicht genommen werden. Das heisst, wir würden damit einfach die bestehende Regulierungslogik beibehalten (schon jetzt haften Hersteller für Herstellungsfehler).
«Der Google Car besitzt meines Wissens eine Art “Not-Aus-Taster”, der das Fahrzeug schnellstmöglich zum Stehen bringt. Was passiert, wenn ich diesen nicht gedrückt habe, weil ich aufgrund meiner Erwartungshaltung gedacht habe, das Auto “löst das Problem von sich aus”?»
Was für Pflichten hat jemand, die oder der ein autonomes Auto verwendet? Das ist, würde ich meinen, genau eine Frage, die es in Zukunft zu klären gäbe – und diese Frage scheint mir klärbar. Das spezifische Beispiel mit dem Not-Knopf scheint mir im Übrigen nicht unähnlich einer Frage, die es jetzt schon gibt: Müssen Autolenkerinnen und Autolenker in der Lage sein, bei ungewollter Beschleunigung des Autos das Auto zum Stillstand zu bringen? (Wie oft es tatsächlich zu solchen Beschleunigungen als Autofehler kommt, und wie oft es sich um Pedalenverwechslung handelt, ist eine andere Frage.).
Gruess
Ich glaube auch, dass fahrerlose Autos sicherer sind. Dafür gibt es neue Gefahren: Hackerangriff auf die Aotos selber oder gegen Staumelder und Kartendienste. Softwarefehler, welche nur zu bestimmten Zeiten alles lahmlegen (Millenium-Bug, Schaltsekunden etc.).
Ich fahre einen Tesla S. Seit ein paar Tagen kann das Auto auf Autobahnen, Überlandstrassen und im innerstädtischen Stop-and-Go selbständig Lenken und Beschleunigen ( + und – ). Die Software fährt um Klassen entspannter und gelassener als ich. Auf den Dörfern hingegen ist die Lenkassistentin völlig überfordert. Das kann ich besser.
Fazit: Es geht um sowohl-als-auch, nicht um entweder-oder.
Und ja, mal von Null auf 130 in knapp 4 Sekunden zu beschleunigen ist schon ein rattenscharfes Feeling. Es gibt auch die emotionale Seite…